
调度系统 RCS

劢微调度系统能同时支持数百台不同车型车辆同一场地协同运行,并快速规划出最优路线,实现全局最优导航路线规划,在最短时间内 完成任务,确保最高效率运行。
支持无人叉车、四向穿梭车、AMR共用一套调度系统,兼容激光导航、天空导航等单种或多种导航方式

环境实时构建

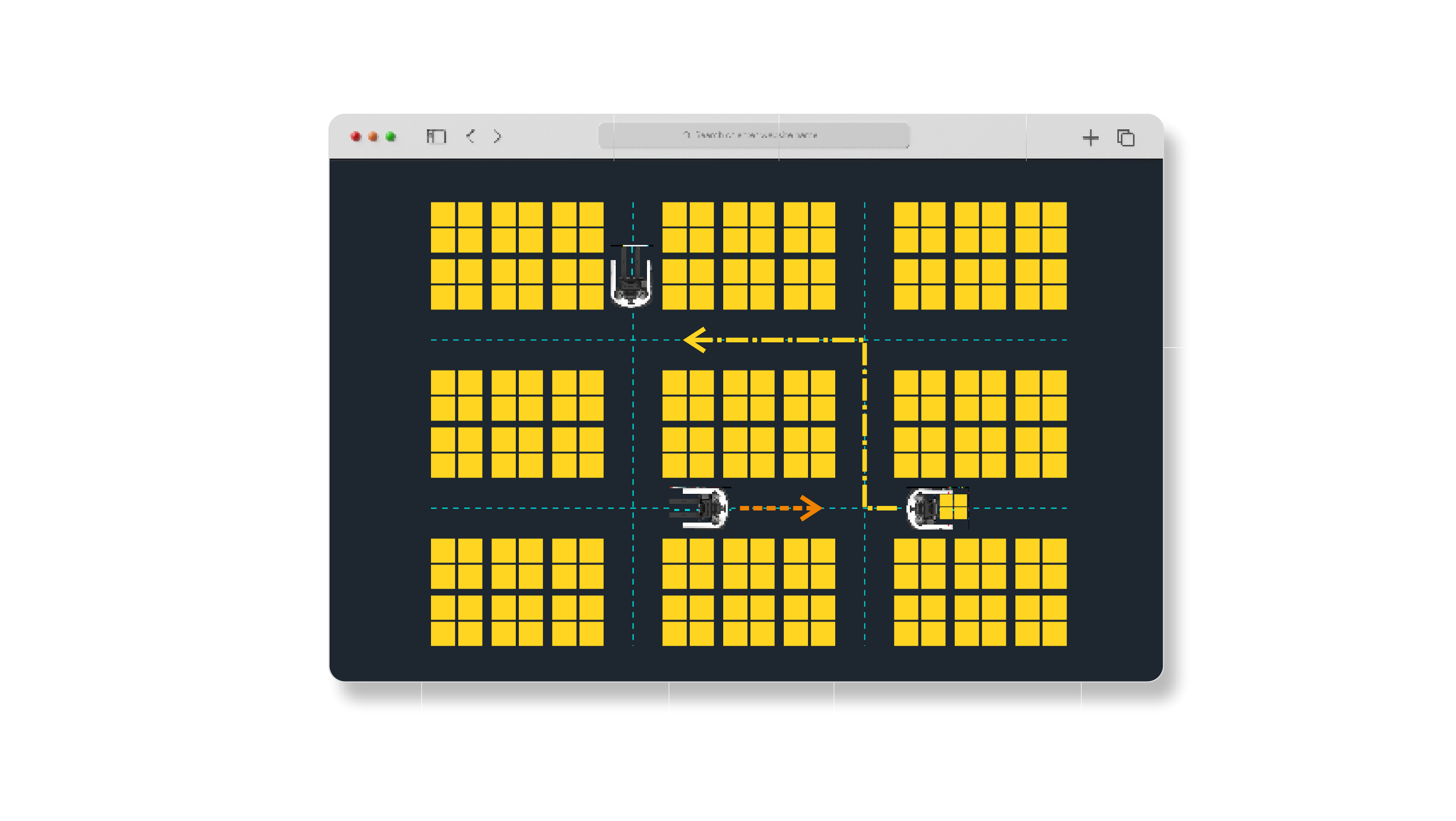
最优路径规划

智能交管调度

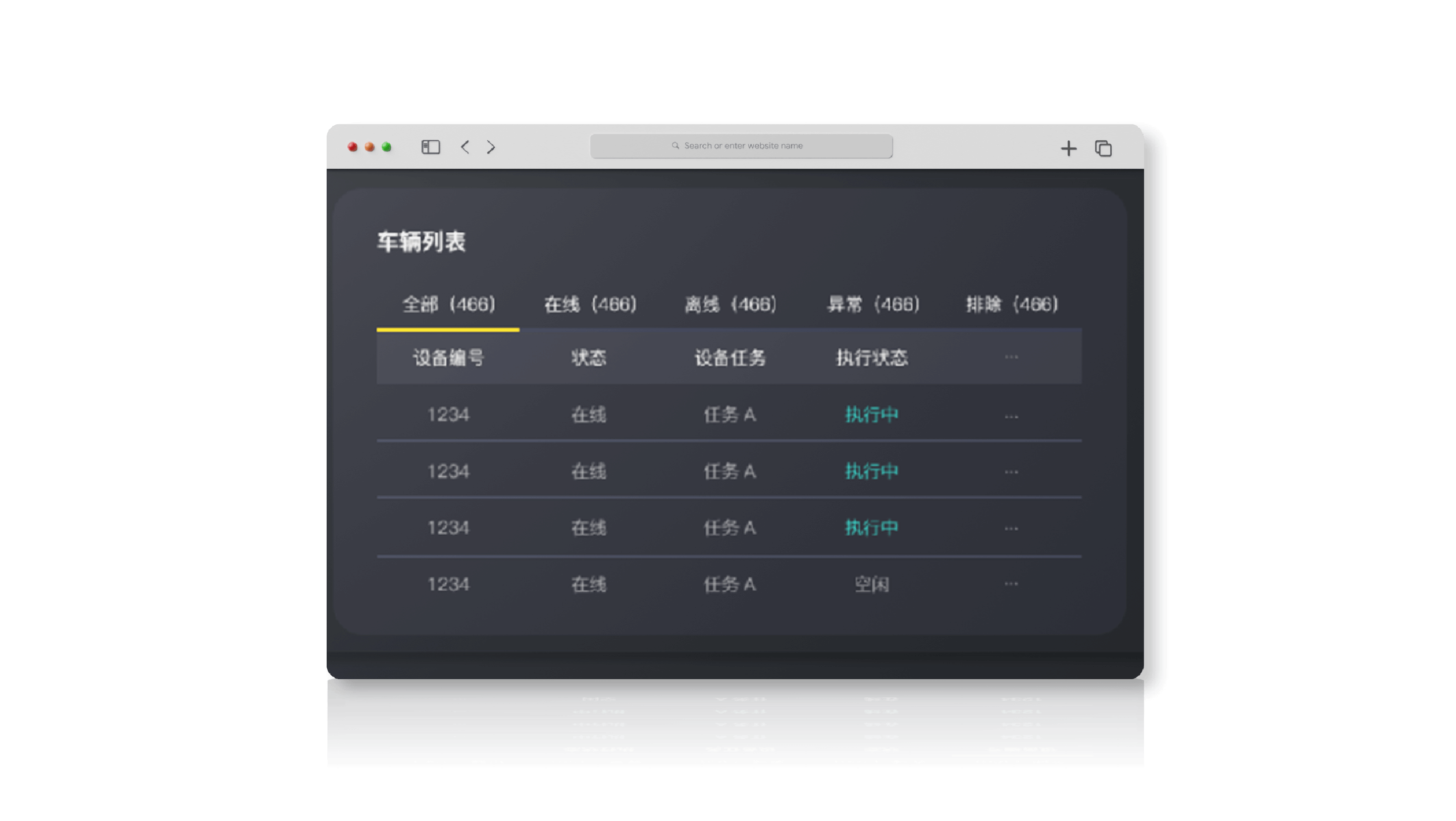
设备监控管理

任务就近派车

智能任务排序
01
动态监控
02
任务管理

03
车辆管理
04
报表统计
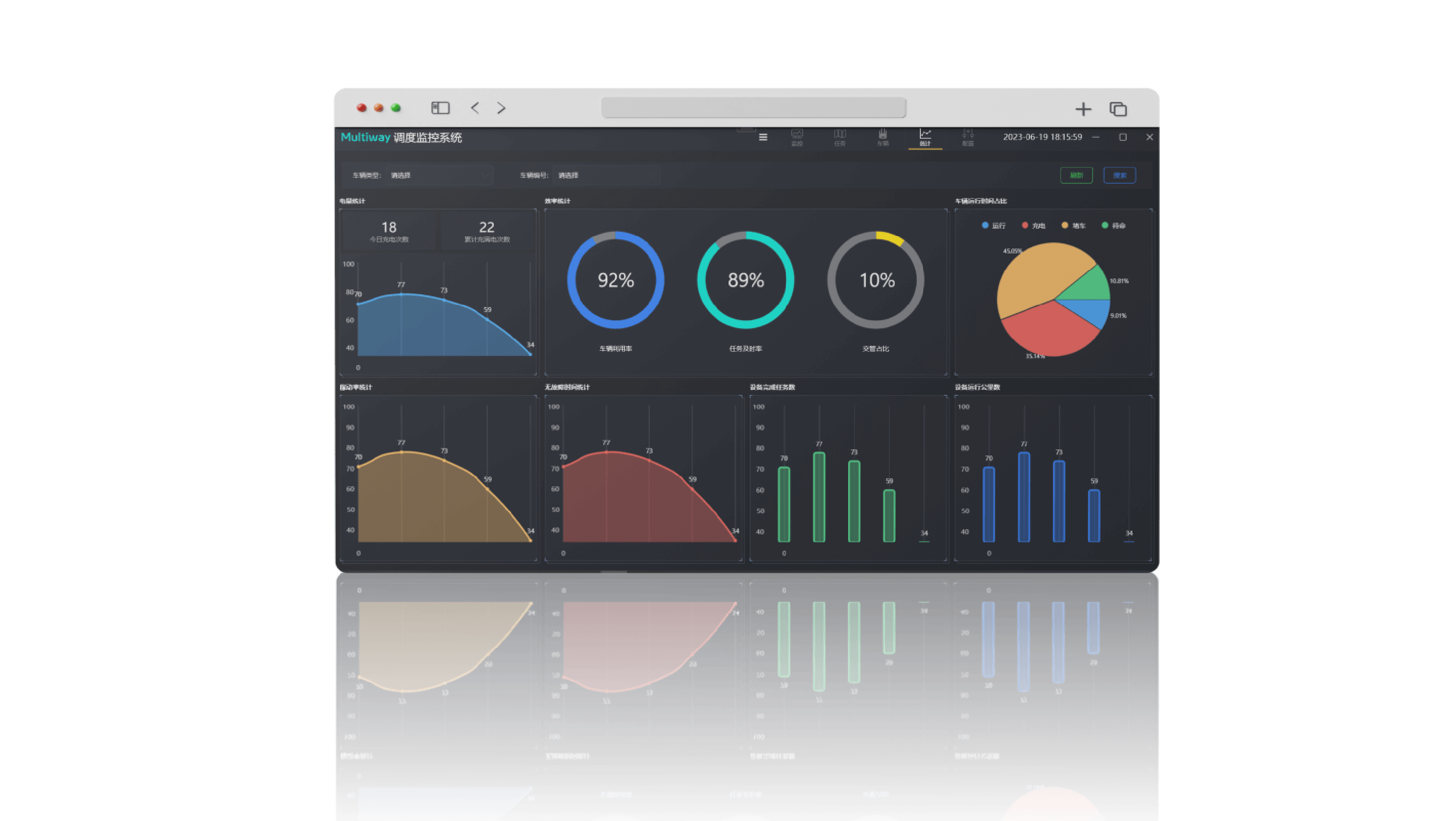
05
交通管制
06
设备管理
07
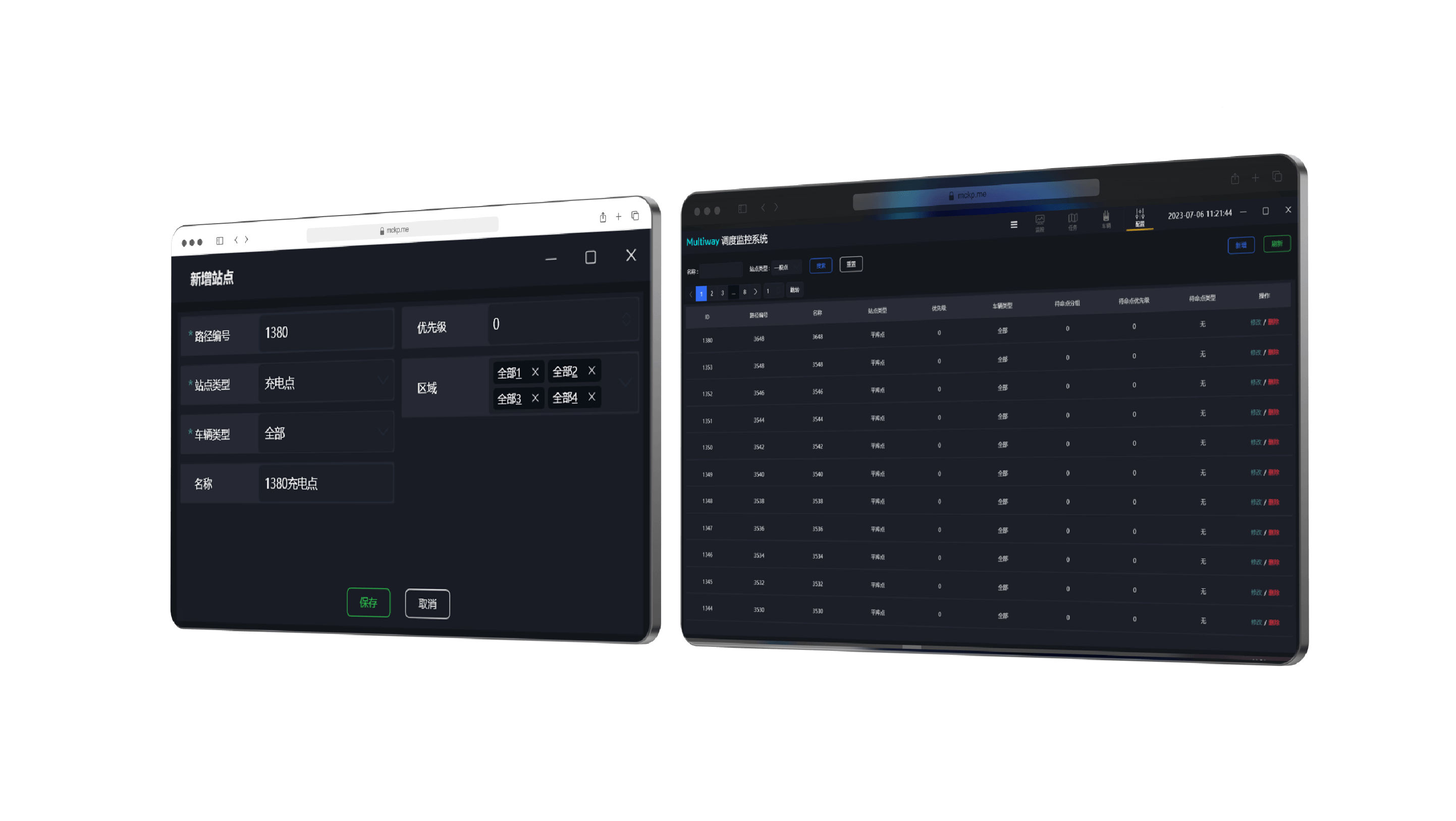
系统配置